
|
| Home |
| Research |
| Activites |
| Publication |
| Contact Info |
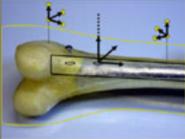
Development of Surgical Guidance System Short Info – Currently, many orthopedic operations require x-ray exposure during the surgery to allow the surgeon to indicate the position and orientation of the patient’s internal organs and implants. This conventional method has a major disadvantage which is an excessive amount of x-ray from the fluoroscopic imaging system to both surgeon and patient during the operation. This project is to develop a new surgical guidance system which requires a minimum number of x-ray exposures, and to develop and implement the Thailand’s first robot-assisted surgical system. |
 |
|
|
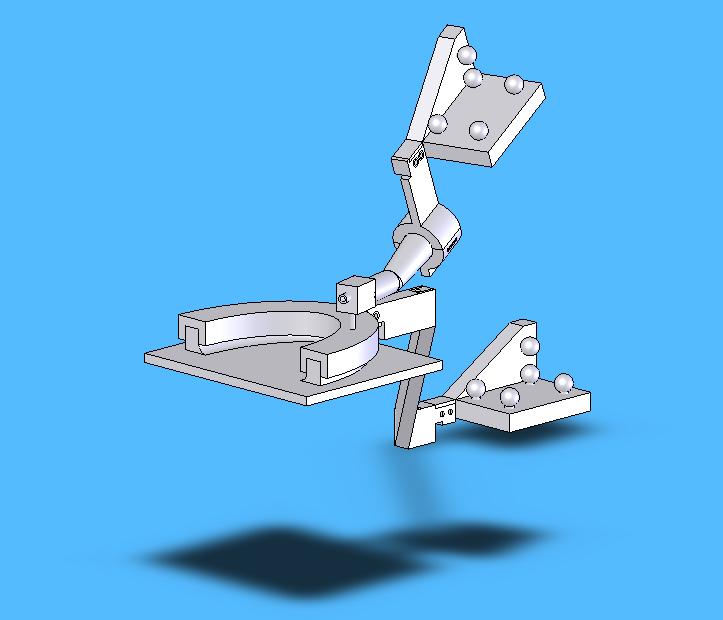
Development of Navigation System for Dental Surgery Short Info – This Project is to develop an assisted surgical system for dental applications, called NavDent. NavDent is an real-time image guided system which allows dentists to acquire precise real-time position, orientation and motion of their hand-tools through a GUI on monitor. NavDent is also working with pre-operative information from CT images and planned path. |
 |
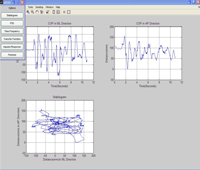
Human Motion Analysis Short Info – The project “Human Analysis for Medical Applications” has objectives to develop prototype of two medical devices: Surgical Guidance System and Postural Sway Perturbation System. These practical prototypes offer low-cost systems, which can finally reduce importing of such devices. Another project objective is to develop basic knowledge domestically, which will be the foundation for future research in this area. |
 |
M.U. Binary Hyper-Redundant Robotic Manipulator Short Info – Continuous actuators, such as motors, operate most robotic manipulators. These actuators require complex and expensive control and sensor systems. In this study, binary hyper-redundant (BHR) robotic manipulators are shown to be viable candidates for use in applications where high repeatability and reasonable accuracy are required. This study investigates the design, construction, properties and kinematics analysis of a new 3-D binary hyper-redundant (BHR) robotic manipulator prototype, “The MU-BHR Manipulator.” |
2.jpg) |
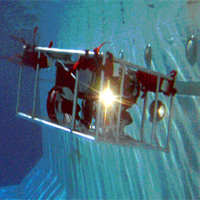
ThaiXPole – An Underwater Robot for Antarctica Exploration Short Info – Thailand has a great opportunity to send a marine scientist to explore the Antarctica Region in collaboration with other world-class scientists. To reduce the risk of the scientist under these extreme conditions, and to increase the capability in exploring and acquiring data, many involved institutes realize the importance of the research and development of an underwater robotic system (ThaiXPole) to assist the Thai scientist in this exploration. |
 |
Self-Replicating Robots Short Info – The concept of self-replicating machines was introduced more than fifty years ago by John von Neumann. However, to our knowledge a fully autonomous self-replicating robot has not been implemented until now. Here we investigate a fully autonomous prototype that demonstrates robotic self replication. |
 |